
Robot cuadrúpedo inteligente


Introducción
Actualización del algoritmo: Movimientos más ágiles y flexibles
Lograr una mayor capacidad para superar obstáculos y realizar movimientos de alta dificultad.
1. Puede saltar trincheras, saltar alto, realizar volteretas frontales y otros movimientos de alta dificultad.
2. Subir escalones de 15 cm, casi la altura máxima alcanzable por robots cuadrúpedos del mismo tamaño.
3. Apoyar volteretas hacia atrás, giros corporales, saltos con giro, saludos, moonwalk, volteretas y levantamientos, etc.
Evolución escalable
Diseño modular para una expansión ilimitada.
La capacidad de carga de 1,45 kg para caminar amplía enormemente el espacio de expansión.
2. Proporcionar interfaces de desarrollo de capacidades de percepción avanzadas (SDK y API).
3. Con una estructura e interfaces modulares abiertas, admite la instalación de módulos RTK, 5G, hosts de IA, procesadores de borde y diversos sensores.
4. Equipado con lidar y cámara de profundidad, permite un desarrollo profundo de capacidades de percepción avanzadas como navegación autónoma, parada y evitación automática de obstáculos, posicionamiento visual y reconstrucción del entorno.
Aumento del 50 % en el torque articular: Potencia excepcional para tus movimientos.
Los módulos de accionamiento de juntas de alto par desarrollados internamente presentan una densidad de par ultra alta, un ancho de banda de respuesta y una eficiencia de transmisión inversa.
Incremento del 1,40 % en la carga útil máxima para caminar.
2. Casi duplicó su resistencia al movimiento, con un tiempo de movimiento continuo de 90 minutos y un alcance de 5 km.
Triple aumento en la potencia de cálculo de los sistemas de control de grado industrial.
Adopte una IMU de grado industrial para una mejora integral de la estabilidad y la capacidad de procesamiento.
1. Primera introducción de un sistema de control en tiempo real de grado industrial con un núcleo profundamente optimizado.
2. La potencia de cálculo general aumentó casi tres veces.
3. Con comunicación en tiempo real de alta velocidad y una frecuencia de control de hasta 1 kHz.
Sistema de interacción hombre-máquina totalmente actualizado
1. Rendimiento mejorado de la transmisión de imágenes en tiempo real con menor latencia.
2. Se agregó interacción mediante lenguaje natural, lo que permite a los usuarios obtener varios estados del robot cuadrúpedo en tiempo real.
3. Movimientos asistidos por percepción más seguros y diversos
4. Admite la detención, el reconocimiento y el seguimiento de obstáculos delanteros y traseros, la evitación de obstáculos delanteros, la navegación autónoma y otras funciones.
Parámetros técnicos
| 1. Plataforma de hardware | |
| Tamaño de pie | Longitud 610 mm ± 10 mm, Ancho 370 mm ± 10 mm, Altura 445 mm ± 10 mm |
| Tamaño acostado | Longitud 680 mm ± 10 mm, Ancho 370 mm ± 10 mm, Altura 175 mm ± 10 mm |
| Peso total (con batería) | aprox. 12,2 kg |
| Resistencia sin carga | 1,5h~2h, alcance: 4km |
| El robot emplea un algoritmo de control de fuerza completo para el equilibrio. Puede realizar una detección de fuerza 3D sin puntos ciegos de 360° en el pie sin sensores de presión en la planta del pie, lo que se traduce en un bajo desgaste del calzado y un bajo costo de mantenimiento. | |
| Material | Muslos: aleación de aluminio; vástagos: plástico compuesto de alta resistencia; s suelas: caucho amortiguador, antideslizante y resistente al desgaste. |
| batería | Equipado con batería de litio enchufable; capacidad de la batería ≥4400 mAh, energía nominal ≥126,7 Wh; tiempo de carga: 40 min ~ 1 h. |
| Profundidad de campo | Grados de libertad totales (GDL): 12; GDL por pierna: 3. |
| módulo conjunto | Adopta un módulo de unión integrado con un diámetro exterior ≤76 mm; compuesto por un motor de alta densidad de par, un reductor de alta precisión, un codificador absoluto y un sensor de temperatura. |
| Salida de alimentación integrada (5V/12V/24V) e interfaces de comunicación (Ethernet/WiFi) para un desarrollo secundario conveniente. | |
| Modos de protección | Parada de emergencia suave, alarma de baja tensión, alarma de sobretemperatura. |
| 2. Control de movimiento |
| Incorpora un sensor inercial de grado industrial; la resolución del acelerómetro es de hasta 0,09 mg y la del giroscopio de hasta 0,004°/s. |
| Frecuencia de control del bus de comunicación: 1 kHz. |
| Proporciona una marcha estable y pasos rápidos. |
| Permite realizar diversas marchas, como subir escaleras, pendientes y gatear; pendiente máxima de ascenso: 40° (dependiendo del material de la pendiente); altura máxima continua del escalón: 15 cm; adaptable a carreteras de hormigón, caminos de grava, etc. |
| Carga útil para caminar de forma continua: hasta 4,5 kg. |
| Permite el desplazamiento en el mismo lugar, la traslación hacia adelante/atrás/izquierda/derecha y la rotación hacia la izquierda/derecha. |
| Ofrece diversas demostraciones de movimientos: salto hacia adelante, salto con giro, moonwalk, etc.; distancia máxima de salto hacia adelante: 50 cm. |
| Favorece el desarrollo de otras marchas y movimientos de alto rendimiento. |
| 3. Percepción inteligente |
| Cámara gran angular*1: campo de visión horizontal de 130°; 1920×1080 a 30 fps; antirreflejos, sin distorsiones; admite el desarrollo de algoritmos de reconocimiento y seguimiento del cuerpo humano. |
| radares ultrasónicos*2: admiten la detección de distancia y el desarrollo de algoritmos de parada de obstáculos. |
| Equipado con sistema para evitar obstáculos delanteros y traseros. |
| 4. Desarrollo secundario |
| Proporciona el modelo del robot, el SDK y la API de movimiento, una demostración del desarrollo de movimiento y manuales de desarrollo secundarios detallados. |
| Proporciona interfaces de software para el desarrollo de sistemas de percepción, con manuales de usuario y de desarrollo detallados; sistema ROS integrado para un desarrollo secundario rápido. |
Presentación de la empresa
En 2008, se fundó en Beijing la empresa Beijing Hewei Yongtai Technology Co., LTD., centrada en el desarrollo y la operación de equipos de seguridad especiales, que prestan servicio principalmente a la ley de seguridad pública, la policía armada, el ejército, la aduana y otros departamentos de seguridad nacional.
En 2010, se fundó en Guannan la empresa Jiangsu Hewei Police Equipment Manufacturing Co., LTD. Con una superficie de 9000 metros cuadrados que incluye talleres y oficinas, su objetivo es construir una base de investigación y desarrollo de equipos de seguridad especiales de primera clase en China.
En 2015, se creó en Shenzhen un centro de investigación y desarrollo militar-policial. Centrado en el desarrollo de equipos de seguridad especiales, ha desarrollado más de 200 tipos de equipos de seguridad profesionales.






Exposiciones en el extranjero


Certificados
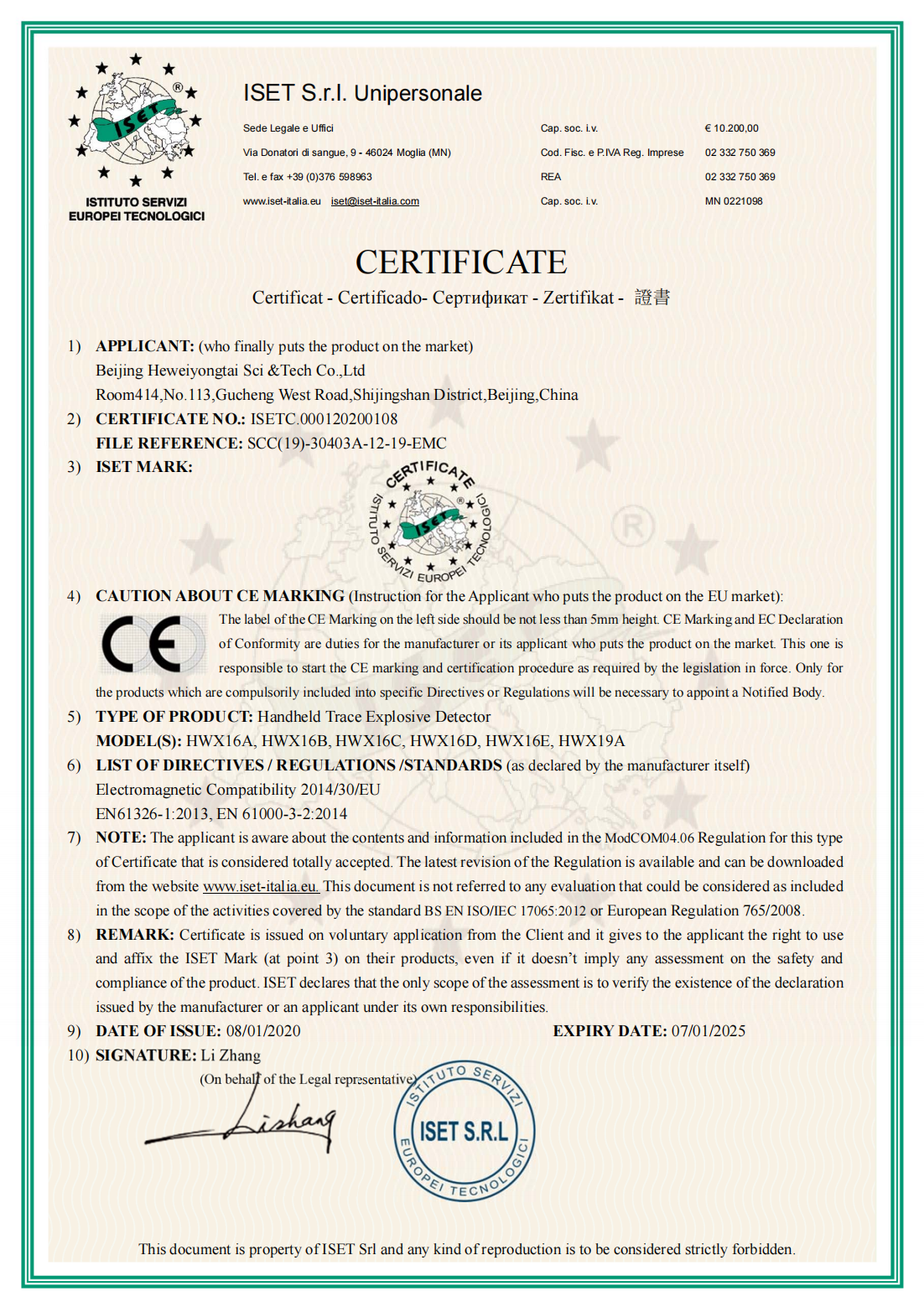

Beijing Heweiyongtai Sci & Tech Co., Ltd. es un proveedor líder de soluciones de desactivación de explosivos y seguridad. Nuestro personal está compuesto por profesionales técnicos y administrativos altamente cualificados para brindarle un servicio satisfactorio.
Todos nuestros productos cuentan con informes de pruebas de nivel profesional a nivel nacional y certificados de autorización, así que puede realizar su pedido con total confianza.
Estricto control de calidad para garantizar una larga vida útil del producto y un trabajo seguro para el operario.
Con más de 10 años de experiencia en la industria de desactivación de explosivos, equipos antiterroristas, dispositivos de inteligencia, etc.
Hemos prestado servicios profesionales a clientes de más de 60 países en todo el mundo.
Sin cantidad mínima de pedido para la mayoría de los artículos, entrega rápida para artículos personalizados.




